一、概览
相机驱动层位于HAL Moudle与硬件层之间,借助linux内核驱动框架,以文件节点的方式暴露接口给用户空间,让HAL Module通过标准的文件访问接口,从而能够将请求顺利地下发到内核中,而在内核中,为了更好的支持视频流的操作,早先提出了v4l视频处理框架,但是由于操作复杂,并且代码无法进行较好的重构,难以维护等原因,之后便衍生出了v4l2框架。
按照v4l2标准,它将一个数据流设备抽象成一个videoX节点,从属的子设备都对应着各自的v4l2_subdev实现,并且通过media controller进行统一管理,整个流程复杂但高效,同时代码的扩展性也较高。
而对高通平台而言,高通整个内核相机驱动是建立在v4l2框架上的,并且对其进行了相应的扩展,创建了一个整体相机控制者的CRM,它以节点video0暴露给用户空间,主要用于管理内核中的Session、Request以及与子设备,同时各个子模块都实现了各自的v4l2_subdev设备,并且以v4l2_subdev节点暴露给用户空间,与此同时,高通还创建了另一个video1设备Camera SYNC,该设备主要用于同步数据流,保证用户空间和内核空间的buffer能够高效得进行传递。
再往下与相机驱动交互的便是整个相机框架的最底层Camera Hardware了,驱动部分控制着其上下电逻辑以及寄存器读取时序并按照I2C协议进行与硬件的通信,和根据MIPI CSI协议传递数据,从而达到控制各个硬件设备,并且获取图像数据的目的。
V4L2英文是Video for Linux 2,该框架是诞生于Linux系统,用于提供一个标准的视频控制框架,其中一般默认会嵌入media controller框架中进行统一管理,v4l2提供给用户空间操作节点,media controller控制对于每一个设备的枚举控制能力,于此同时,由于v4l2包含了一定数量的子设备,而这一系列的子设备都是处于平级关系,但是在实际的图像采集过程中,子设备之间往往还存在着包含于被包含的关系,所以为了维护并管理这种关系,media controller针对多个子设备建立了的一个拓扑图,数据流也就按照这个拓扑图进行流转。
二、流程简介
整个对于v4l2的操作主要包含了如下几个主要流程:
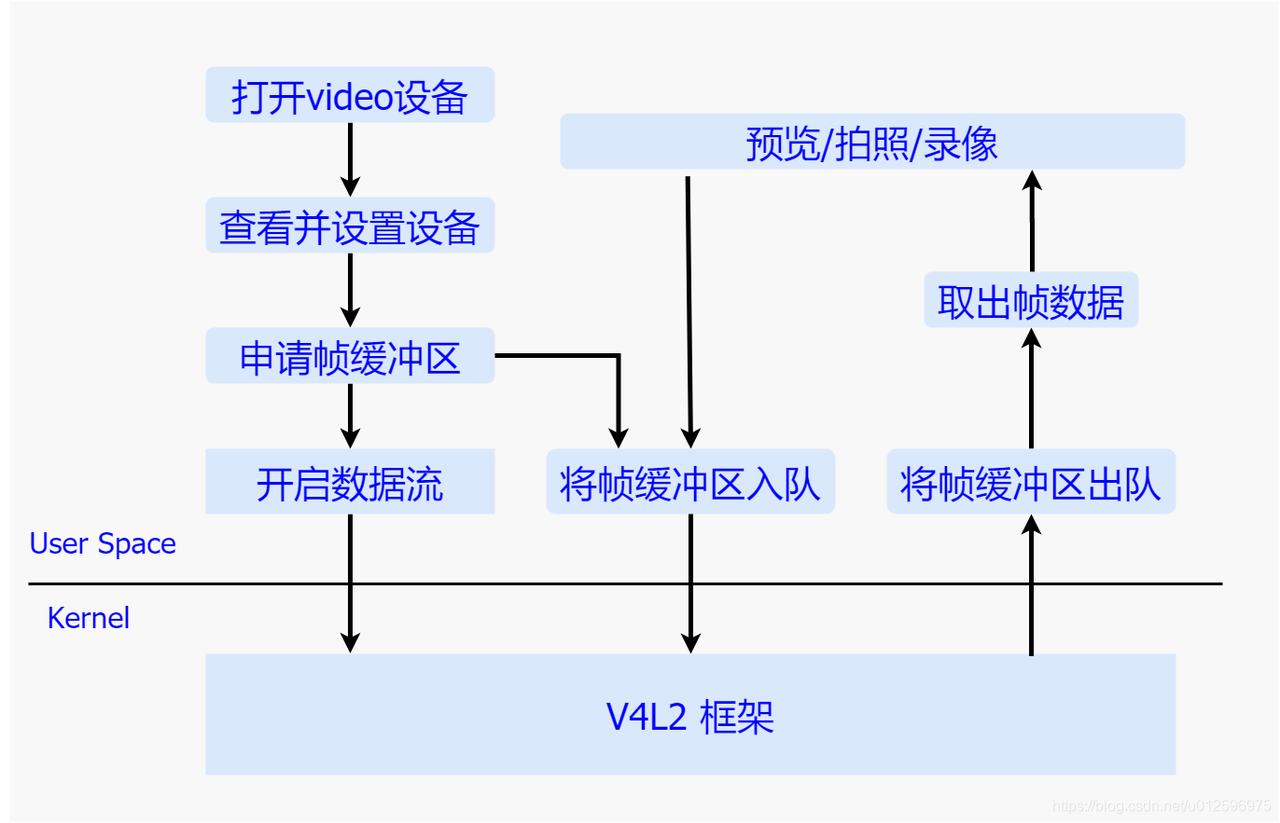
a) 打开video设备
在需要进行视频数据流的操作之前,首先要通过标准的字符设备操作接口open方法来打开一个video设备,并且将返回的字符句柄存在本地,之后的一系列操作都是基于该句柄,而在打开的过程中,会去给每一个子设备的上电,并完成各自的一系列初始化操作。
b) 查看并设置设备
在打开设备获取其文件句柄之后,就需要查询设备的属性,该动作主要通过ioctl传入VIDIOC_QUERYCAP参数来完成,其中该系列属性通过v4l2_capability结构体来表达,除此之外,还可以通过传入VIDIOC_ENUM_FMT来枚举支持的数据格式,通过传入VIDIOC_G_FMT/VIDIOC_S_FMT来分别获取和获取当前的数据格式,通过传入VIDIOC_G_PARM/VIDIOC_S_PARM来分别获取和设置参数。
c) 申请帧缓冲区
完成设备的配置之后,便可以开始向设备申请多个用于盛装图像数据的帧缓冲区,该动作通过调用ioctl并且传入VIDIOC_REQBUFS命令来完成,最后将缓冲区通过mmap方式映射到用户空间。
d) 将帧缓冲区入队
申请好帧缓冲区之后,通过调用ioctl方法传入VIDIOC_QBUF命令来将帧缓冲区加入到v4l2 框架中的缓冲区队列中,静等硬件模块将图像数据填充到缓冲区中。
e) 开启数据流
将所有的缓冲区都加入队列中之后便可以调用ioctl并且传入VIDIOC_STREAMON命令,来通知整个框架开始进行数据传输,其中大致包括了通知各个子设备开始进行工作,最终将数据填充到V4L2框架中的缓冲区队列中。
f)将帧缓冲区出队
一旦数据流开始进行流转了,我们就可以通过调用ioctl下发VIDIOC_DQBUF命令来获取帧缓冲区,并且将缓冲区的图像数据取出,进行预览、拍照或者录像的处理,处理完成之后,需要将此次缓冲区再次放入V4L2框架中的队列中等待下次的图像数据的填充。
整个采集图像数据的流程现在看来还是比较简单的,接口的控制逻辑很清晰,主要原因是为了提供给用户的接口简单而且抽象,这样方便用户进行集成开发,其中的大部分复杂的业务处理都被V4L2很好的封装了,接下来我们来详细了解下V4L2框架内部是如何表达以及如何运转的。
三、关键结构体
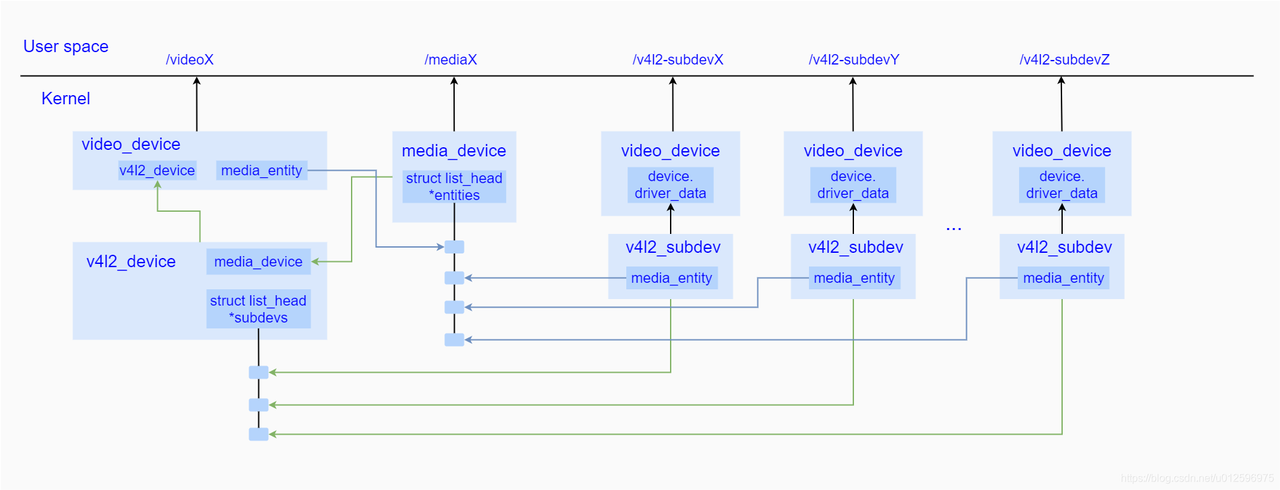
从上图不难看出,v4l2_device作为顶层管理者,一方面通过嵌入到一个video_device中,暴露video设备节点给用户空间进行控制,另一方面,video_device内部会创建一个media_entity作为在media controller中的抽象体,被加入到media_device中的entitie链表中,此外,为了保持对所从属子设备的控制,内部还维护了一个挂载了所有子设备的subdevs链表。
而对于其中每一个子设备而言,统一采用了v4l2_subdev结构体来进行描述,一方面通过嵌入到video_device,暴露v4l2_subdev子设备节点给用户空间进行控制,另一方面其内部也维护着在media controller中的对应的一个media_entity抽象体,而该抽象体也会链入到media_device中的entities链表中。
通过加入entities链表的方式,media_device保持了对所有的设备信息的查询和控制的能力,而该能力会通过media controller框架在用户空间创建meida设备节点,将这种能力暴露给用户进行控制。
由此可见,V4L2框架都是围绕着以上几个主要结构体来进行的,接下来我们依次简单介绍下:
3.1 v4l2_device
[->kernel/msm-4.19/include/media/v4l2-device.h]
1 | /** |
该结构体代表了一个整个V4L2设备,作为整个V4L2的顶层管理者,内部通过一个链表管理着整个从属的所有的子设备,并且如果将整个框架放入media conntroller进行管理,便在初始化的时候需要将创建成功的media_device赋值给内部变量 mdev,这样便建立了于与media_device的联系,驱动通过调用v4l2_device_register方法和v4l2_device_unregister方法分别向系统注册和释放一个v4l2_device。
3.2 v4l2_subdev
[->kernel\msm-4.19\include\media\v4l2-subdev.h]
1 |
|
该结构体代表了一个子设备,每一个子设备都需要在初始化的时候挂载到一个总的v4l2_device上,并且将该v4l2设备赋值给内部的v4l2_dev变量,之后将自身加入到v4l2_device中的子设备链表中进行统一管理,这种方式提高了遍历访问所有子设备的效率,同时为了表达不同硬件模块的特殊操作行为,v4l2_subdev定义了一个v4l2_subdev_ops 结构体来进行定义,其实现交由不同的硬件模块来具体完成。其中如果使能了CONFIG_MEDIA_CONTROLLER宏,便会在media_controller中生成一个对应的media_entity,来代表该子设备,而该entity便会存入子设备结构体中的entity变量中,最后,如果需要创建一个设备节点的话,通过video_device调用标准API接口进行实现,而相应的video_device便会存入其内部devnode变量中。
3.3 video_device
[->kernel\msm-4.19\include\media\v4l2-dev.h]
1 | /** |
如果需要给v4l2_device或者v4l2_subdev在系统中创建节点的话,便需要实现该结构体,并且通过video_register_device方法进行创建,而其中的fops便是video_device所对应的操作方法集,在v4l2框架内部,会将video_device嵌入到一个具有特定主设备号的字符设备中,而其方法集会在操作节点时被调用到。除了这些标准的操作集外,还定义了一系列的ioctl操作集,通过内部ioctl_ops来描述。
3.4 media_device
[->kernel\msm-4.19\include\media\media-device.h]
1 | ** |
如果使能了CONFIG_MEDIA_CONTROLLER宏,则当v4l2_device初始化的过程中便会去创建一个media_device,而这个media_device便是整个media controller的抽象管理者,每一个v4l2设备以及从属的子设备都会对应的各自的entity,并且将其存入media_device中进行统一管理,与其它抽象设备一样,media_device也具有自身的行为,比如用户可以通过访问media节点,枚举出所有的从属于同一个v4l2_device的子设备,另外,在开启数据流的时候,media_device通过将各个media_entity按照一定的顺序连接起来,实现了数据流向的整体控制。
3.5 vb2_queue
[->kernel\msm-4.19\include\media\videobuf2-core.h]
1 | /** |
在整个V4L2框架运转过程中,最为核心的是图像数据缓冲区的管理,而这个管理工作便是由vb2_queue来完成的,vb2_queue通常在打开设备的时候被创建,其结构体中的vb2_ops可以由驱动自己进行实现,而vb2_mem_ops代表了内存分配的方法集,另外,还有一个用于将管理用户空间和内核空间的相互传递的方法集buf_ops,而该方法集一般都定义为v4l2_buf_ops这一标准方法集。除了这些方法集外,vb2_queue还通过一个vb2_buffer的数组来管理申请的所有数据缓冲区,并且通过queued_list来管理入队状态的所有buffer,通过done_list来管理被填充了数据等待消费的所有buffer。
3.6 vb2_buffer
[->kernel\msm-4.19\include\media\videobuf2-core.h]
1 | /** |
该结构体代表了V4L2框架中的图像缓冲区,当处于入队状态时内部queued_entry会被链接到vb2_queue中的queued_list中,当处于等待消费的状态时其内部done_entry会被链接到vb2_queue 中的done_list中,而其中的vb2_queue便是该缓冲区的管理者。
3.7 小结
以上便是V4L2框架的几个核心结构体,从上面的简单分析不难看出,v4l2_device作为一个相机内核体系的顶层管理者,内部使用一个链表控制着所有从属子设备v4l2_subdev,使用vb2_queue来申请并管理所有数据缓冲区,并且通过video_device向用户空间暴露设备节点以及控制接口,接收来自用户空间的控制指令,通过将自身嵌入media controller中来实现枚举、连接子设备同时控制数据流走向的目的。
四、模块初始化
整个v4l2框架是在linux内核中实现的,所以按照内核驱动的运行机制,会在系统启动的过程中,通过标准的module_init方式进行初始化操作,而其初始化主要包含两个方面,一个是v4l2_device的初始化,一个是子设备的初始化,首先我们来看下v4l2_device的初始化动作的基本流程。
由于驱动的实现都交由各个平台厂商进行实现,所有内部逻辑都各不相同,这里我们抽离出主要方法来进行梳理:
首先对于v4l2_device的初始化而言,在系统启动的过程中,linux内核会找到module_init声明的驱动,调用其probe方法进行探测相应设备,一旦探测成功,便表示初始化工作完成。
而在probe方法内部,主要做了以下操作:
- 获取dts硬件信息,初始化部分硬件设备。
- 创建v4l2_device结构体,填充信息,通过v4l2_device_register方法向系统注册并且创建video设备节点。
- 创建media_device结构体,填充信息,通过media_device_register向系统注册,并创建media设备节点,并将其赋值给v4l2_device中的mdev。
- 创建v4l2_device的media_entity,并将其添加到media controller进行管理。
类似于v4l2_device的初始化工作,子设备的流程如下:
- 获取dts硬件信息,初始化子设备硬件模块
- 创建v4l2_subdev结构体,填充信息,通过v4l2_device_register_subdev向系统注册,并将其挂载到v4l2_device设备中
- 创建对应的media_entity,并通过media_device_register_entity方法其添加到media controller中进行统一管理。
- 最后调用v4l2_device_register_subdev_nodes方法,为所有的设置了V4L2_SUBDEV_FL_HAS_DEVNODE属性的子设备创建设备节点。
五、处理用户空间请求
系统启动之后,初始化工作便已经完成,现在一旦用户想要使用图像采集功能,便会触发整个视频采集流程,会通过操作相应的video节点来获取图像数据,一般来讲,标准的V4L2框架只需要通过操作video节点即可,但是由于现在的硬件功能越来越复杂,常规的v4l2_controller已经满足不了采集需求,所以现在的平台厂商通常会暴露子设备的设备节点,在用户空间直接通过标准的字符设备控制接口来控制各个设备,而现在我们的目的是梳理V4L2框架,所以暂时默认不创建子设备节点,简单介绍下整个流程。
在操作之前,还有一个准备工作需要做,那就是需要找到哪些是我们所需要的设备,而它的设备节点是什么,此时便可以通过打开media设备节点,并且通过ioctl注入MEDIA_IOC_ENUM_ENTITIES参数来获取v4l2_device下的video设备节点,该操作会调用到内核中的media_device_ioctl方法,而之后根据传入的命令,进而调用到media_device_enum_entities方法来枚举所有的设备。
整个采集流程,主要使用三个标准字符设备接口来完成,分别是用于打开设备的open方法、用于控制设备的ioctl方法以及关闭设备的close方法。
5.1 打开设备(open)
一旦确认了我们需要操作的video节点是哪一个,便可以通过调用字符设备标准接口open方法来打开设备,而这个方法会首先陷入内核空间,然后调用file_operations中的open方法,再到v4l2_file_operations中的open方法,而该方法由驱动自己进行实现,其中主要包括了给各个硬件模块上电,并且调用vb2_queue_init方法创建并初始化一个vb2_queue用于数据缓冲区的管理。
5.2 控制设备(ioctl)
在打开设备之后,接下来的大部分操作都是通过ioctl方法来完成的,而在该方法中,会首先陷入到内核空间,之后调用字符设备的v4l2_fops中的v4l2_ioctl方法,而在该方法中又会去调用video_device的video_ioctl2方法,video_ioctl2方法定义了一系列video标准的方法,通过不同的命令在v4l2_ioctls中找到相应的标准方法实现,同时为了满足用户自定义命令的实现,在video_ioctl2方法中会去调用到之前注册video_device时赋予的ioctl_ops中的vidioc_default方法,在该方法中加入用户自己的控制逻辑。
在整个控制流程中,首先通过命令VIDIOC_QUERYCAP来获取设备所具有的属性,通过VIDIOC_G_PARM/VIDIOC_S_PARM来分别获取和设置设备参数,在这一系列操作配置完成之后,便需要向内核申请用于数据流转的缓冲区(Buffer),该操作通过命令VIDIOC_REQBUFS来完成,在内核部分主要调用了标准方法vb2_reqbufs,进而调用__vb2_queue_alloc来向内核申请已知个数的Buffer,并且将其存入之前创建的vb2_queue中进行管理。
申请好了Buffer之后,便可以通过传入VIDIOC_QBUF命令将申请的Buffer入队,具体操作最终会调用vb2_qbuf方法,而在该方法中会从vb2_queue的bufs数组中取出Buffer,将其加入queued_list链表中,并且更新Buffer状态,等待数据的填充或者来自用户空间的出队操作。
在完成上面的操作后,整个数据流并没有开始流转起来,所以需要下发VIDIOC_STREAMON命令来通知整个框架开始出数据,在驱动中主要会去调用vb2_streamon方法,进而调用vb2_start_streaming方法,其中该方法会去将队列中的的Buffer放入到相应的驱动中,等待被填充,紧接着会去调用vb2_queue.ops.start_streaming方法来通知设备开始出图,而该方法一般由驱动自己实现,最后会调用v4l2_subdev_call(subdev, video, s_stream, mode)方法通知各个子设备开始出图。
当有图像产生时,会填充到之前传入的buffe中,并且调用vb2_buffer_done方法通知vb2_queue将buffer加入到done_list链表中,并更新状态为VB2_BUF_STATE_DONE。
在整个数据流开启之后,并不会自动的将图像传入用户空间,必须通过VIDIOC_DQBUF命令来从设备中读取一个帧图像数据,具体操作是通过层层调用会调用到vb2_dqbuf方法,而在该方法中会调用vb2_get_done_vb方法去从done_list中获取Buffer,如果当前链表为空则会等待最终数据准备好,如果有准备好的buffer便直接从done_list取出,并且将其从queued_list中去掉,最后通过vb2_dqbuf方法将Buffer返回用户空间。
获取到图像数据之后,便可以进行后期的图像处理流程了,在处理完成之后,需要下发VIDIOC_QBUF将此次buffer重新加入queued_list中,等待下一次的数据的填充和出队操作。
但不需要进行图像的采集时,可以通过下发VIDIOC_STREAMOFF命令来停止整个流程,具体流程首先会调用v4l2_subdev_call(subdev, video, s_stream, 0)通知所有子设备停止出图操作,其次调用vb2_buffer_done唤醒可能的等待Buffer的线程,同时更新Buffer状态为VB2_BUF_STATE_ERROR,然后调用vb2_streamoff取消所有的数据流并更新vb2_queue.streaming的为disable状态。
5.3 关闭设备(close)
但确认不使用当前设备进行图像采集操作之后,便可以调用标准方法close来关闭设备。其中主要包括了调用vb2_queue_release方法释放了vb2_queue以及设备下电操作和相关资源的释放。
六、总结
通过上面的介绍,我相信我们已经对整个V4L2框架有了一个比较深入的认识, 然而对于一个优秀的软件架构而言,仅仅是支持现有的功能是远远不够的,随着功能的不断完善,势必会出现需要进行扩展的地方,而v4l2在设计之初便很好的考虑到了这一点,所以提供了用于扩展的方法集,开发者可以通过加入自定的命令来扩充整个框架,高通在这一点上做的非常好,在v4l2框架基础上,设计出了一个独特的KMD框架,提供给UMD CSL进行访问的接口。